Identification of the Dynamic Parameters of the Orthoglide
Résumé
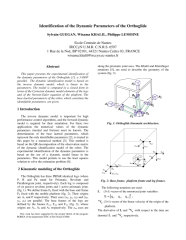
This paper presents the experimental identification of the dynamic parameters of the Orthoglide [1], a 3-DOF parallel. The dynamic identification model is based on the inverse dynamic model, which is linear in the parameters. The model is computed in a closed form in terms of the Cartesian dynamic model elements of the legs and of the Newton-Euler equation of the platform. The base inertial parameters of the robot, which constitute the identifiable parameters, are given.
Fichier principal
 Identification_Dynamic_Parameters_Orthoglide_Guegan_Khalil_Lemoine.pdf (208.64 Ko)
Télécharger le fichier
orthoglide_project_khalil.mov (21.27 Mo)
Télécharger le fichier
Identification_Dynamic_Parameters_Orthoglide_Guegan_Khalil_Lemoine.pdf (208.64 Ko)
Télécharger le fichier
orthoglide_project_khalil.mov (21.27 Mo)
Télécharger le fichier
Origine : Fichiers produits par l'(les) auteur(s)
Format : Autre
Loading...