
Un périphérique pour la saisie réaliste d'objets avec retour tactile
Résumé
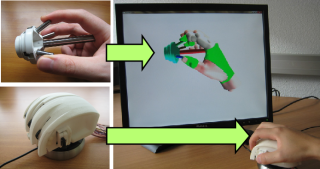
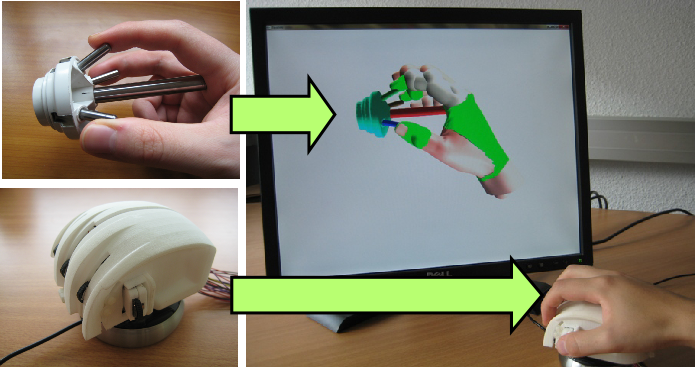
Nous présentons un prototype d'un périphérique immersif pour contrôler une main virtuelle avec une grande dextérité. Ce prototype est basé sur des résultats de tests utilisateurs réalisés sur des versions précédentes de notre périphérique, ainsi que sur l'analyse d'une tâche de saisie. Aussi simple à utiliser qu'une souris, il permet le contrôle simultané d'un grand nombre de degrés de liberté (ddl) et inclue un retour tactile. Les problèmes de conception, certains phénomènes physiques et/ou comportements physiologiques ainsi que la structure du périphérique sont tous étroitement liés et influencent de manière significative les interactions. Ces aspects sont exposés et analysés. Les objectifs correspondants incluent la réduction d'efforts pendant des mouvements de la main et des doigts virtuels liée à la forme du périphérique, au type de capteurs et à leur position, le retour d'informations multi-sensorielles pertinentes à l'utilisateur, la dextérité et la performance des manipulations effectuées. Un exemple de tâche de saisie montre l'effet de ce dispositif immersif pour réaliser des interactions efficaces et intuitives, permettant ainsi d'envisager des nouvelles perspectives d'interaction avec des scènes virtuelles.
Fichier principal
 AFRV2010.pdf (4.48 Mo)
Télécharger le fichier
AFRV2010.pdf (4.48 Mo)
Télécharger le fichier
 HN_V5.png (458.72 Ko)
Télécharger le fichier
HN_V5.png (458.72 Ko)
Télécharger le fichier
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Loading...