Inverting the Reflectance Map with Binary Search
Résumé
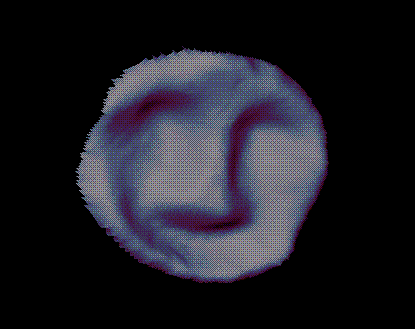
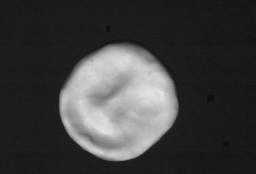
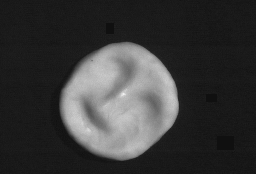
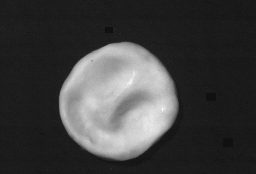
Stereophotometric computer vision is based on the inversion of an equation system which represents the physical reflection phenomenon under different lighting conditions. In noisy conditions, the system has generally no solution, and the typical way to solve it is to find the solution which minimizes some error function. This paper proposes a new approach to deal with this system, using the so-called Geometrical Compatibility Function. The problem is turned into a root-finding in a one-dimensional space and the robustness is largely improved with respect to wrong reflectance model coefficients.
Fichier principal
 sfs.pdf (113.29 Ko)
Télécharger le fichier
sfs.pdf (113.29 Ko)
Télécharger le fichier
 tete1.png (10.43 Ko)
Télécharger le fichier
tete1.png (10.43 Ko)
Télécharger le fichier
 tete2.png (27.51 Ko)
Télécharger le fichier
tete2.png (27.51 Ko)
Télécharger le fichier
 tete3.png (27.32 Ko)
Télécharger le fichier
tete3.png (27.32 Ko)
Télécharger le fichier
 tete4.png (27.67 Ko)
Télécharger le fichier
tete4.png (27.67 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Loading...