Camera Pose Estimation with Semantic 3D Model
Résumé
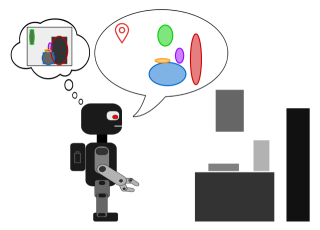
In computer vision, estimating camera pose from correspondences between 3D geometric entities and their projections into the image is a widely investigated problem. Although most state-of-the-art methods exploit simple primitives such as points or lines, and thus require dense scene models, the emergence of very effective CNN-based object detectors in the recent years has paved the way to the use of much lighter 3D models composed solely of a few semantically relevant features. In that context, we propose a novel model-based camera pose estimation method in which the scene is modeled by a set of virtual ellipsoids. We show that 6-DoF camera pose can be determined by optimizing only the three orientation parameters, and that at least two correspondences between 3D ellipsoids and their 2D projections are necessary in practice. We validate the approach on both simulated and real environments.
Fichier principal
 IROS2019.pdf (1.63 Mo)
Télécharger le fichier
IROS2019.pdf (1.63 Mo)
Télécharger le fichier
 IROS_schema.pdf (93.93 Ko)
Télécharger le fichier
IROS_schema.pdf (93.93 Ko)
Télécharger le fichier
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Loading...