Asynchronous haptic simulation of contacting deformable objects with variable stiffness
Résumé
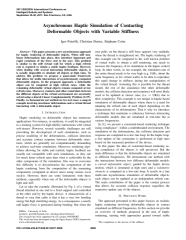
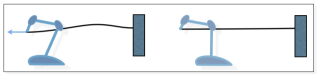
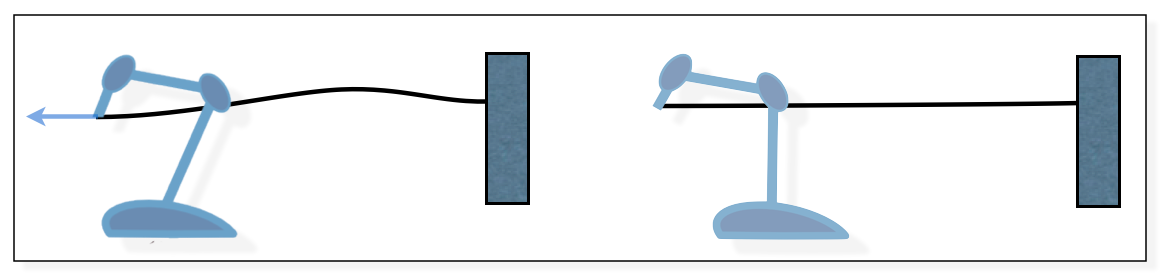
Abstract--This paper presents a new asynchronous approach for haptic rendering of deformable objects. When stiff nonlinear deformations take place, they introduce important and rapid variations of the force sent to the user. This problem is similar to the stiff virtual wall for which a high refresh rate is required to obtain a stable haptic feedback. However, when dealing with several interacting deformable objects, it is usually impossible to simulate all objects at high rates. To address this problem we propose a quasi-static framework that allows for stable interactions of asynchronously computed deformable objects. In the proposed approach, a deformable object can be computed at high refresh rates, while the remaining deformable virtual objects remain computed at low refresh rates. Moreover, contacts and other constraints between the different objects of the virtual environment are accurately solved using a shared Linear Complementarity Problem (LCP). Finally, we demonstrate our method on two test cases: a snap-in example involving non-linear deformations and a virtual thread interacting with a deformable object.
Fichier principal
 IROS2011.pdf (1 Mo)
Télécharger le fichier
IROS2011.pdf (1 Mo)
Télécharger le fichier
 Iros.png (38.72 Ko)
Télécharger le fichier
Iros.png (38.72 Ko)
Télécharger le fichier
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Loading...