Distributed processing for modelling real-time multimodal perception in a virtual robot
Résumé
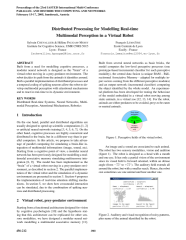
Built from a need for modelling cognitive processes, a modular neural network is designed as the "brain" of a virtual robot moving in a prey-predator environment. The robot decides its path from the animals it identifies around. Both a parallel implementation of distributed processes and a temporal coding of spiking neurons allow the robot to develop multimodal perception with attentional mechanisms and to react in real-time to its dynamic environment.
Fichier principal
 Chevallier-Paugam-Lemaitre-Distributed processing for modelling real-time multimodal perception in a virtual robot-PDCN-2005.pdf (450.28 Ko)
Télécharger le fichier
Chevallier-Paugam-Lemaitre-Distributed processing for modelling real-time multimodal perception in a virtual robot-PDCN-2005.pdf (450.28 Ko)
Télécharger le fichier
Origine : Fichiers produits par l'(les) auteur(s)
Loading...