Collision Detection for Deformable Objects
Résumé
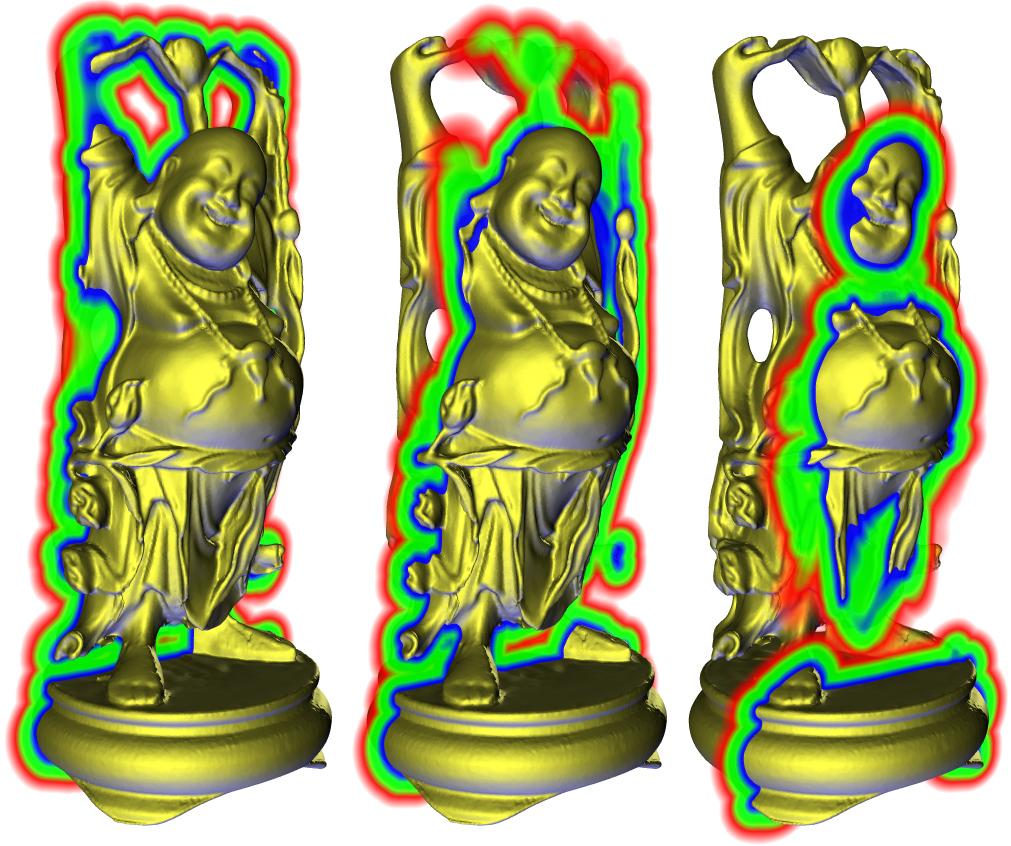
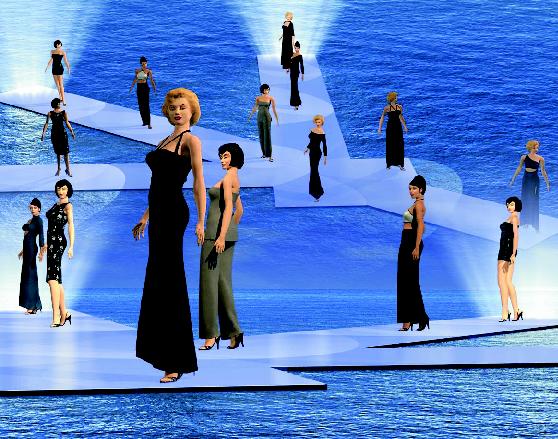
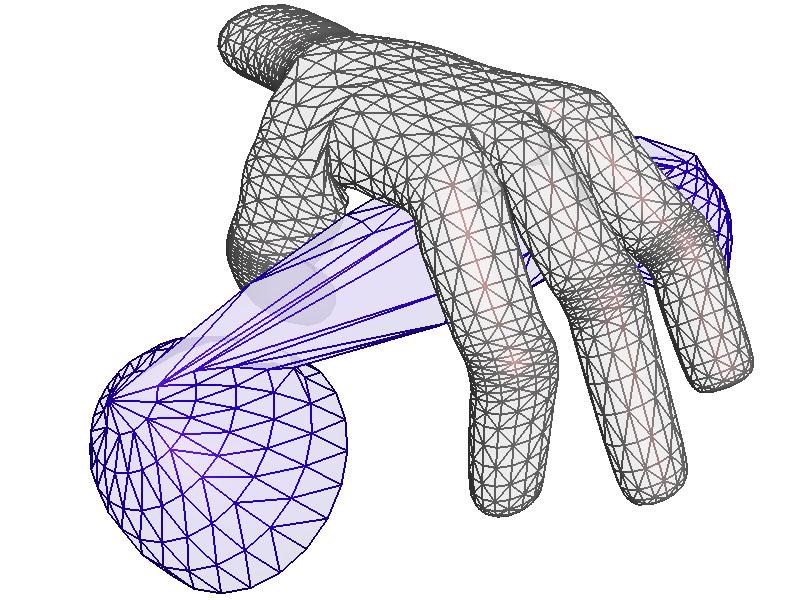
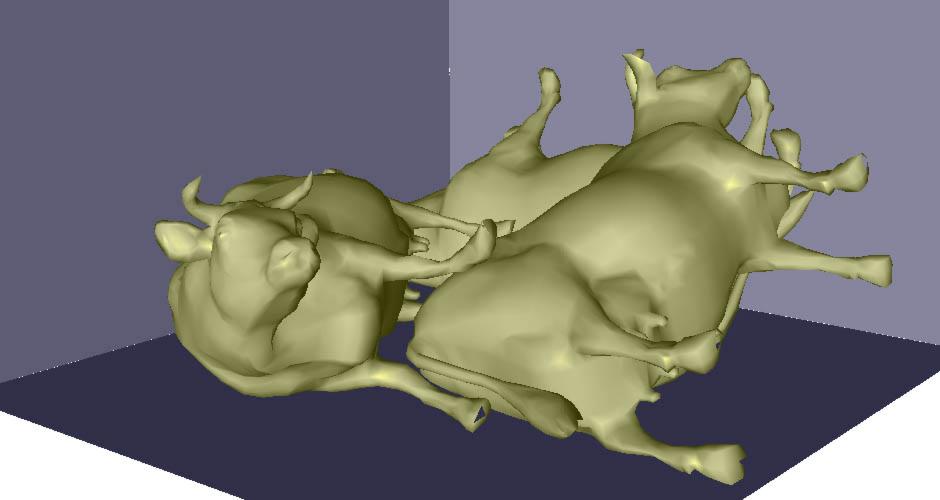
Interactive environments for dynamically deforming objects play an important role in surgery simulation and entertainment technology. These environments require fast deformable models and very efficient collision handling techniques. While collision detection for rigid bodies is well-investigated, collision detection for deformable objects introduces additional challenging problems. This paper focuses on these aspects and summarizes recent research in the area of deformable collision detection. Various approaches based on bounding volume hierarchies, distance fields, and spatial partitioning are discussed. Further, image-space techniques and stochastic methods are considered. Applications in cloth modeling and surgical simulation are presented.
Fichier principal
 STARmain.pdf (2.65 Mo)
Télécharger le fichier
STARmain.pdf (2.65 Mo)
Télécharger le fichier
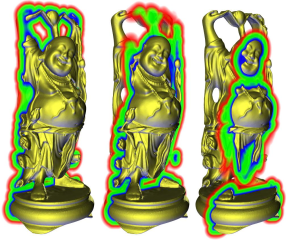 buddaDF2.jpg (133.36 Ko)
Télécharger le fichier
buddaDF2.jpg (133.36 Ko)
Télécharger le fichier
 catwalk.jpg (63.56 Ko)
Télécharger le fichier
catwalk.jpg (63.56 Ko)
Télécharger le fichier
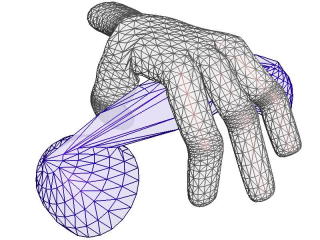 coll.jpg (108.13 Ko)
Télécharger le fichier
coll.jpg (108.13 Ko)
Télécharger le fichier
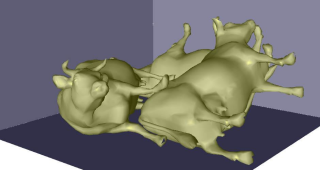 cow5.jpg (27.21 Ko)
Télécharger le fichier
cow5.jpg (27.21 Ko)
Télécharger le fichier
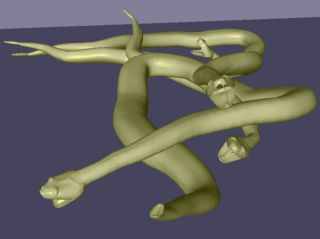 snakesur.jpg (27.85 Ko)
Télécharger le fichier
snakesur.jpg (27.85 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Origine : Fichiers éditeurs autorisés sur une archive ouverte
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Loading...