Analysis of an Integrated 4-DoF Parallel Wrist for Dexterous Gripping
Résumé
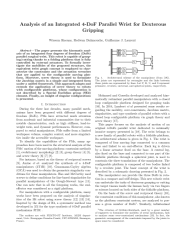
The paper presents the kinematic analysis of an integrated four degrees of freedom (DoFs) parallel surgical wrist. This robot is capable of grasping/cutting thanks to a folding platform that is fully controlled by external actuators. To formally investigate the mobilities of the proposed structure, the equivalent twist graph concept is employed to characterize the constraints and the actuation wrenches that are applied to the configurable moving platform.
Moreover, screw theory is used to formulate the Jacobian matrix in a simple and integrated form under a unified framework. This approach adapts and extends the application of screw theory to robots with configurable platforms, whose configuration is not described by a Special Euclidian group (SE3) element. Finally, an insight of singular configurations is presented.
Fichier principal
 52a56a0c-34b7-4b86-815b-b067ebe765f8-author.pdf (897.67 Ko)
Télécharger le fichier
52a56a0c-34b7-4b86-815b-b067ebe765f8-author.pdf (897.67 Ko)
Télécharger le fichier
Origine : Fichiers produits par l'(les) auteur(s)
Loading...