Design of Integral Controllers for Nonlinear Systems Governed by Scalar Hyperbolic Partial Differential Equations
Résumé
The paper deals with the control and regulation by integral controllers for
the nonlinear systems governed by scalar quasi-linear hyperbolic partial differential
equations. Both the control input and the measured output are located on the boundary.
The closed-loop stabilization of the linearized model with the designed integral controller
is proved first by using the method of spectral analysis and then by the Lyapunov direct
method. Based on the elaborated Lyapunov function we prove local exponential stability
of the nonlinear closed-loop system with the same controller. The output regulation
to the set-point with zero static error by the integral controller is shown upon
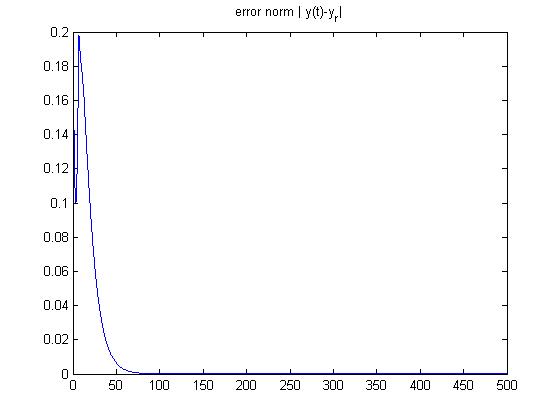
the nonlinear system. Numerical simulations by the Preissmann scheme are carried
out to validate the robustness performance of the designed controller
to face to unknown constant disturbances.
Fichier principal
 Soumission_IEETAC_V3.pdf (1.65 Mo)
Télécharger le fichier
linear1.jpg (16.27 Ko)
Télécharger le fichier
Soumission_IEETAC_V3.pdf (1.65 Mo)
Télécharger le fichier
linear1.jpg (16.27 Ko)
Télécharger le fichier
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Origine : Fichiers produits par l'(les) auteur(s)
Loading...