Improving Robustness of Monocular Urban Localization using Augmented Street View
Résumé
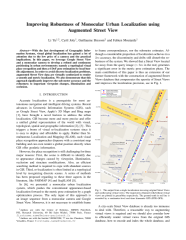
— With the fast development of Geographic Information Systems, visual global localization has gained a lot of attention due to the low price of a camera and the practical implications. In this paper, we leverage Google Street View and a monocular camera to develop a refined and continuous positioning in urban environments: namely a topological visual place recognition and then a 6 DoF pose estimation by local bundle adjustment. In order to avoid discrete localization problems, augmented Street View data are virtually synthesized to render a smooth and metric localization. We also demonstrate that this approach significantly improves the sub-meter accuracy and the robustness to important viewpoint changes, illumination and occlusion.
Fichier principal
 monocularLocalization-augmentedStreetView_MinesParisTEch-VeDeCom_ITSC2016.pdf (2.62 Mo)
Télécharger le fichier
monocularLocalization-augmentedStreetView_MinesParisTEch-VeDeCom_ITSC2016.pdf (2.62 Mo)
Télécharger le fichier
Origine : Fichiers produits par l'(les) auteur(s)