Control of Elastic Soft Robots based on Real-Time Finite Element Method
Résumé
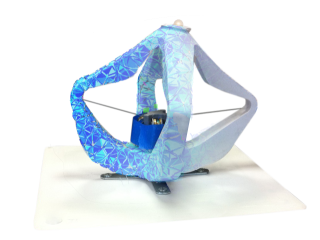
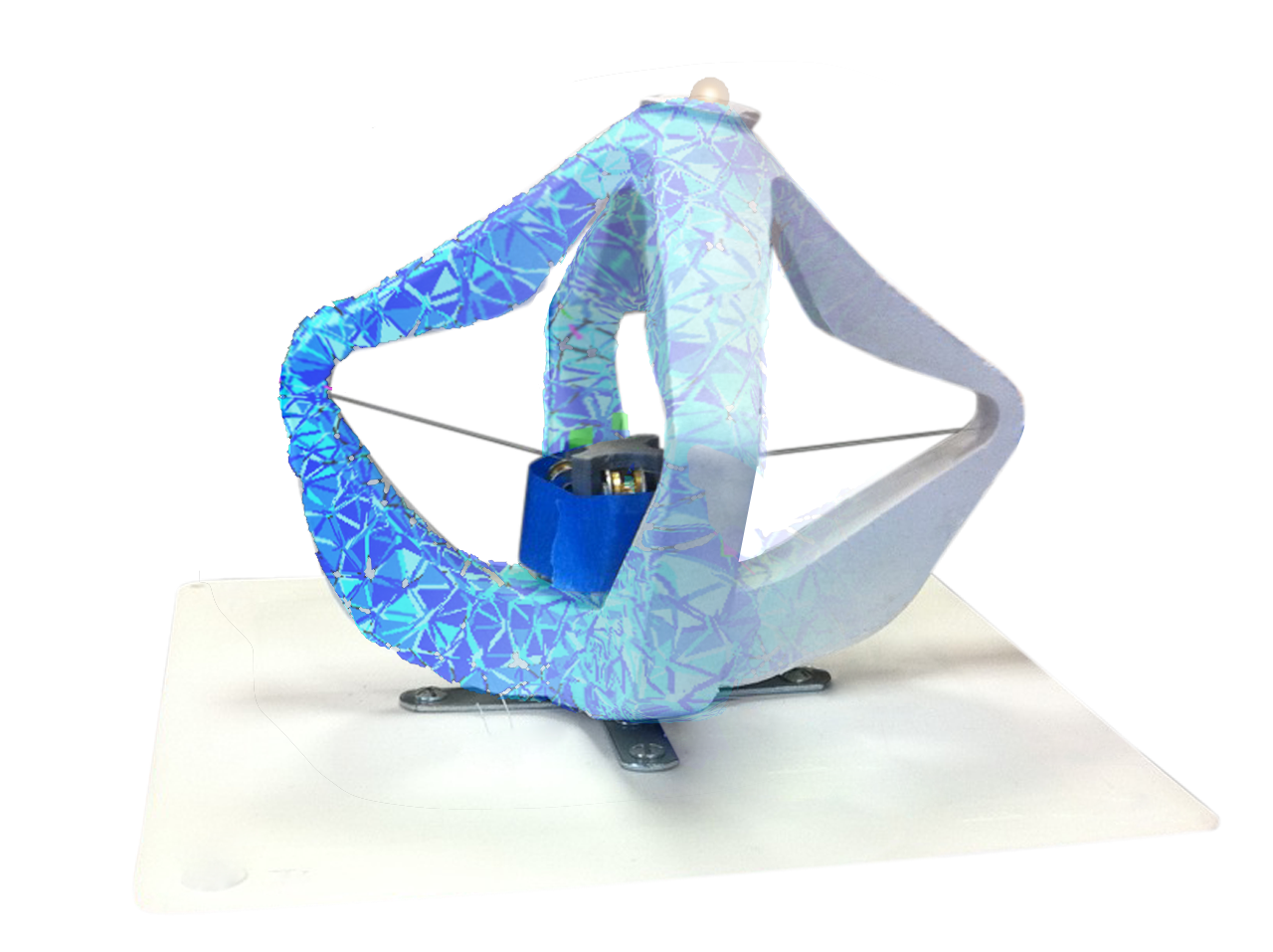
In this paper, we present a new method for the control of soft robots with elastic behavior, piloted by several actuators. The central contribution of this work is the use of the Finite Element Method (FEM), computed in real-time, in the control algorithm. The FEM based simulation computes the nonlinear deformations of the robots at interactive rates. The model is completed by Lagrange multipliers at the actuation zones and at the end-effector position. A reduced compliance matrix is built in order to deal with the necessary inversion of the model. Then, an iterative algorithm uses this compliance matrix to find the contribution of the actuators (force and/or position) that will deform the structure so that the terminal end of the robot follows a given position. Additional constraints, like rigid or deformable obstacles, or the internal characteristics of the actuators are integrated in the control algorithm. We illustrate our method using simulated examples of both serial and parallel structures and we validate it on a real 3D soft robot made of silicone
Fichier principal
 icra2013.pdf (1.9 Mo)
Télécharger le fichier
icra2013.pdf (1.9 Mo)
Télécharger le fichier
 MontageFrancois.png (689.6 Ko)
Télécharger le fichier
ICRAFINAL.mp4 (7.64 Mo)
Télécharger le fichier
MontageFrancois.png (689.6 Ko)
Télécharger le fichier
ICRAFINAL.mp4 (7.64 Mo)
Télécharger le fichier
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Format : Vidéo
Loading...


{kind=link}