RobOptim: an Optimization Framework for Robotics
Résumé
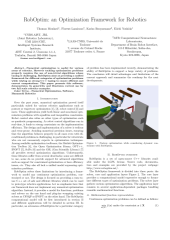
Numerical optimization is useful for various areas of robotics. However tackling optimization problems properly requires the use of non-trivial algorithms whose tuning is challenging. RobOptim aims at providing a unified framework for different categories of optimization problems while relying on strong C++ typing to ensure efficient and correct computations. This paper presents this software, demonstrates its genericity and illustrates current use by two full scale robotics examples.
Domaines
Robotique [cs.RO]
Fichier principal
 robomec13.pdf (1.26 Mo)
Télécharger le fichier
robomec13.pptx (762.31 Ko)
Télécharger le fichier
robomec13.pdf (1.26 Mo)
Télécharger le fichier
robomec13.pptx (762.31 Ko)
Télécharger le fichier
Origine : Fichiers produits par l'(les) auteur(s)
Format : Autre
Loading...