Collective displacement of modular robots using self-reconfiguration.
Résumé
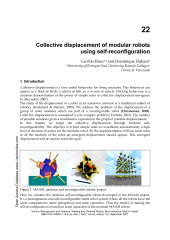
Collective displacement is a very useful behaviour for living creatures. This behaviour can appear in a flock of birds, a school of fish, or a swarm of insects. Flocking behaviour is a common demonstration of the power of simple rules in collective displacement emergence by (Reynolds, 2007). The study of the displacement of a robot in an unknown universe is a traditional subject of robotics (Fredslund & Mataric, 2002). We address the problem of the displacement of a group of robot modules which are part of a reconfigurable robot (Christensen, 2005). Collective displacement is considered a very complex problem (Yoshida, 2001). The number of possible solutions gives a combinative explosion in the graph of possible displacements.
Domaines
Robotique [cs.RO]
Fichier principal
 Collective_Displacement_of_Modular_Robots_using_Self-reconfiguration.pdf (4.45 Mo)
Télécharger le fichier
Collective_Displacement_of_Modular_Robots_using_Self-reconfiguration.pdf (4.45 Mo)
Télécharger le fichier
Origine : Fichiers éditeurs autorisés sur une archive ouverte
Loading...